mCarのプログラム
 |
ホイール 車輪(しゃりん) |
 |
右・左車輪を 前進 スピード〇% |
| 左車輪のスピードと右車輪の[スピードをセットする | |
| 右(左)の車輪を止める | |
 |
やってみないとわからない 左右のタイヤの回転速度の微調整かなぁ |
| 車 | |
| 車の前進 スピード〇% | |
| 車の左(右)回転 速度〇% スピード〇% | |
| 車の左(右)回転 その場所で スピード〇% | |
| 車停止 |
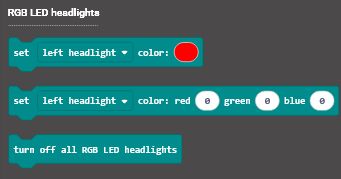 |
ライトの光 |
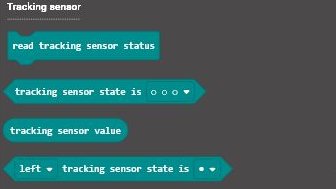 |
下についているセンサー |
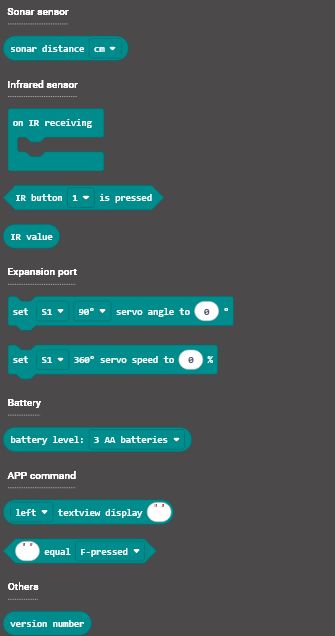 |
前後の距離センサー 他 |
もし前に障害物(しょうがいぶつ)があったら
前にセンサーをつけましょうcm とある命令を探しましょう、これでセンサーからの距離を受け取ることができます。
soner distance cm( ソナー ディスタンス センチメートル)とよいます。
ソナーは超音波(ちょうおんぱ) ディスタンスは距離 cmはセンチメートル
もし(ソナーで測った距離が 「< 20」 で20より大きかったら)ということになります。
<のついた命令を探してくださいね。
その場合は
car turn left でカー ターン レフト とよみ、右にまわります。
数字は色々かえて工夫してみてください
そして、僧でないときは前に進みます。
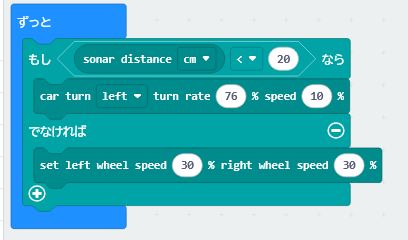
でこれは前に書いてあったプログラム
、こんなふうにしたらどうだろう。
うまくいくだろうか

もどる